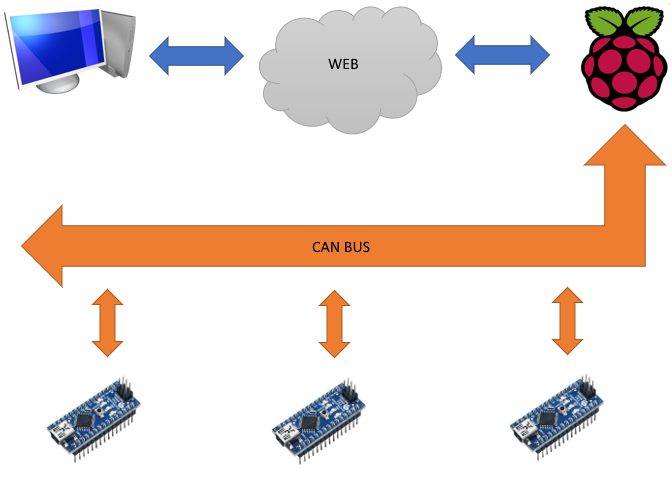
Botler 1 will have different subsystems that will have to communicate. A Raspberry Pi is required for the webserver part of the system. It will manage the buttons pressed by the user and the camera streaming.
Other subsystems will use the cheaper Arduino.
I was thinking about using microcontrollers from Microchip but it could cost more, it would be a longer development time and it would require PCB boards ad hoc.
What about the communication line for the hardware? CAN-BUS modules are available and compatible for the two systems. It provides some protection against information collision and lost messages, which is useful.
Control is everything. Other than the self driving dream I need something more. Internet is not available everywhere and sometimes it is available but at low speeds. What if a local antenna breaks down, rain is coming, and Botler is outside? Lifting it up and carrying it inside would be practical but, as time passes, Botler gains weight: it won’t be a viable solution forever.
An additional ‘Control Point’ is currently being developed. Botler will be connected via WIFI or 3G to Internet services but also with a LAN cable to an access point. This access point will be accessible with a specific ‘remote controller’. Losing WiFi will revert all the system over to 3G, but if required a simple WIFI direct connection will be available.