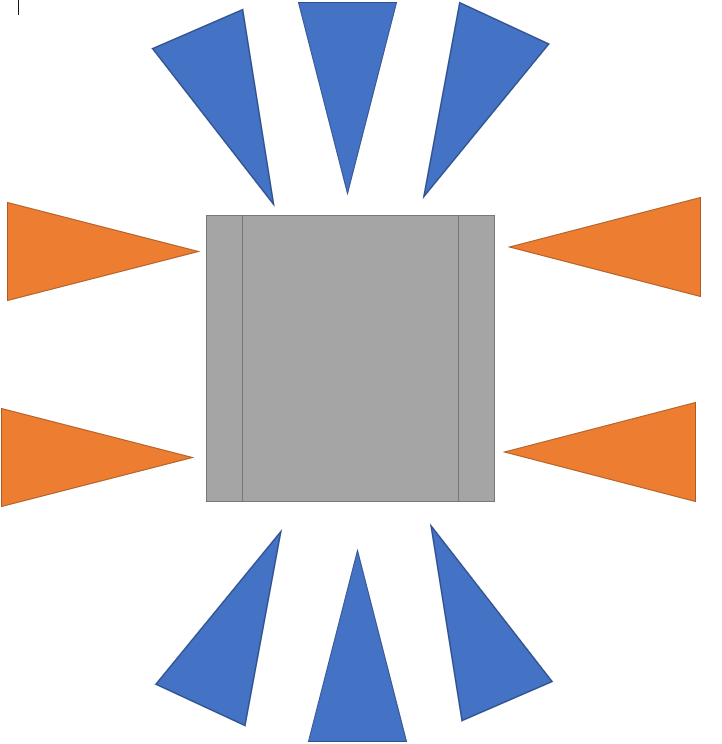
Botler 1 is built on a tank-like platform. It moves forward and backward normally but it turns on the spot.
For that reason there are 4 ultrasonic sensors placed at the edges, facing outward, in order to detect obstacles when turning (orange cones).
In front and on the back of Botler there are 6 more ultrasonic sensors (blue cones).
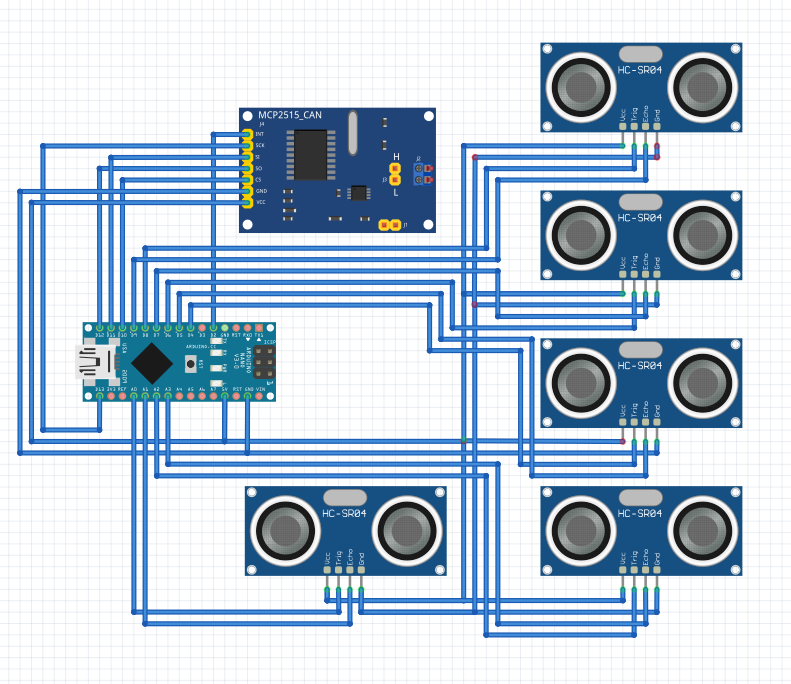
They are connected in group of 5 to two Arduino Nano: front and back sides. Starting from front left and back right (opposite sides) the software scans for obstacles, then it scans the following sensor and so on.
In order to avoid too many ‘false positives’ (when an object is detected due to rogue waves), the pattern remains the same: always a scan on two opposite sensors, and a long enough time to weaken other waves.
A raw calculation gives me:
Speed of sound : 343m/s
which is around 3ms/m
If I need to measure objects at maximum 10m, the distance travelled by waves is 20m
3ms/m * 20m = 60ms
Giving it a rest time of about 20ms, it means that the next sensor fires after 80ms
This means that a complete scan of the sensors is made every 400ms. Adding the can transmission (huge estimation of 100ms) it gives me the ability to have two complete scans every second. Way too good if the user is a human. Readings each second is more than enough!
More details on those sensors in the ‘tell me more’ section.